一.Canny算法介绍
Canny是边缘检测算法,在1986年提出的。
是一个很好的边缘检测器
很常用也很实用的图像处理方法
二.Canny算法介绍
五步 in cv::Canny
1.高斯模糊 – GaussianBlur
2.灰度转换 – cvtColor
3.计算梯度 – Sobel/Scharr
4.非最大信号抑制
5.高低阈值输出二值图像
高低阈值输出二值图像
#T1, T2为阈值,凡是高于T2的都保留,凡是小于T1都丢弃,从高于T2的像素出发,凡是大于T1而且相互连接的,都保留。最终得到一个输出二值图像。
#推荐的高低阈值比值为 T2: T1 = 3:1/2:1其中T2为高阈值,T1为低阈值
三.API – cv::Canny
Canny(
InputArray src, // 8-bit的输入图像
OutputArray edges,// 输出边缘图像, 一般都是二值图像,背景是黑色
double threshold1,// 低阈值,常取高阈值的1/2或者1/3
double threshold2,// 高阈值
int aptertureSize,// Soble算子的size,通常3x3,取值3
bool L2gradient // 选择 true表示是L2来归一化,否则用L1归一化
)
四.代码实现
/*
OpenCV Canny边缘检测学习
Michael Jiang<sencom1997@outlook.com>
2019年7月26日07:26:35
*/
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
int main()
{
Mat src, dst, gray, fin;
//读取图像
src = imread("D:/linus.jpg", IMREAD_COLOR);
//判断读取是否成功
if (src.empty()) {
printf("pic load failed!\n");
return -1;
}
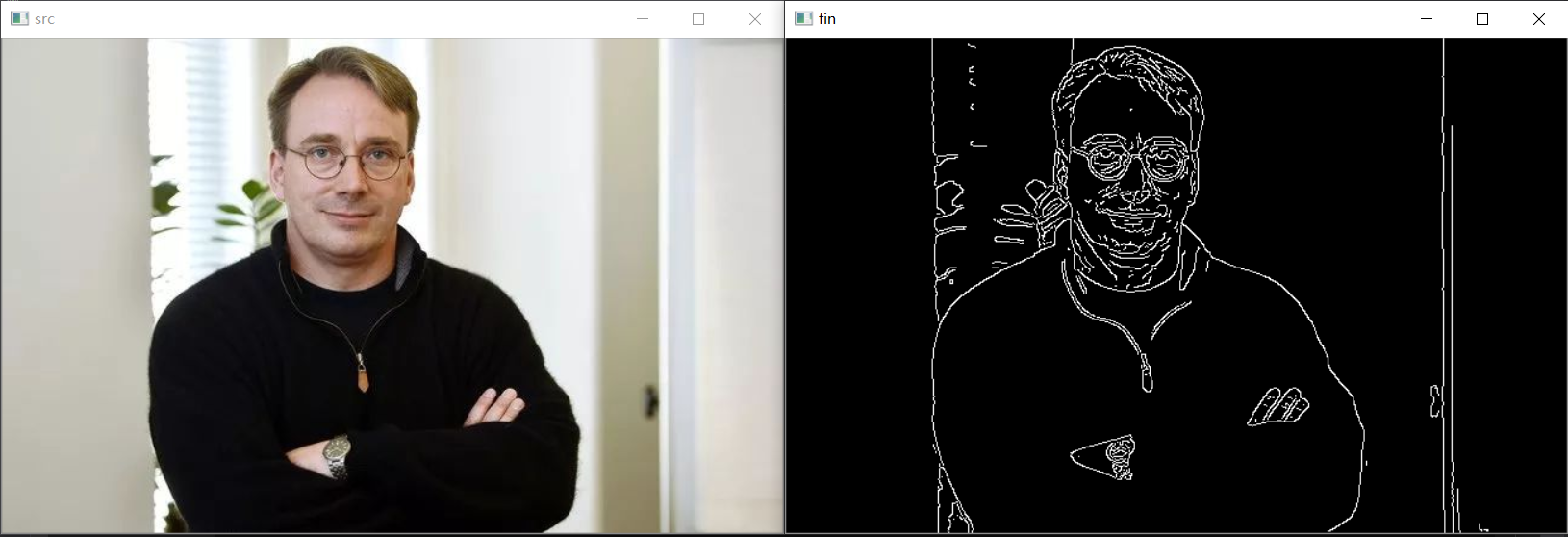
imshow("src", src);
//高斯模糊
GaussianBlur(src, dst, Size(3, 3), 0, 0, BORDER_DEFAULT);
//转灰度
cvtColor(dst, gray, COLOR_BGR2GRAY);
//Canny边缘检测
Canny(gray, fin, 50, 70);
imshow("fin", fin);
waitKey(0);
return 0;
}